欢迎来到天津华茂致远自动化科技有限公司网站!

 185-12233227
185-12233227






基于现代控制理论的抛光模式
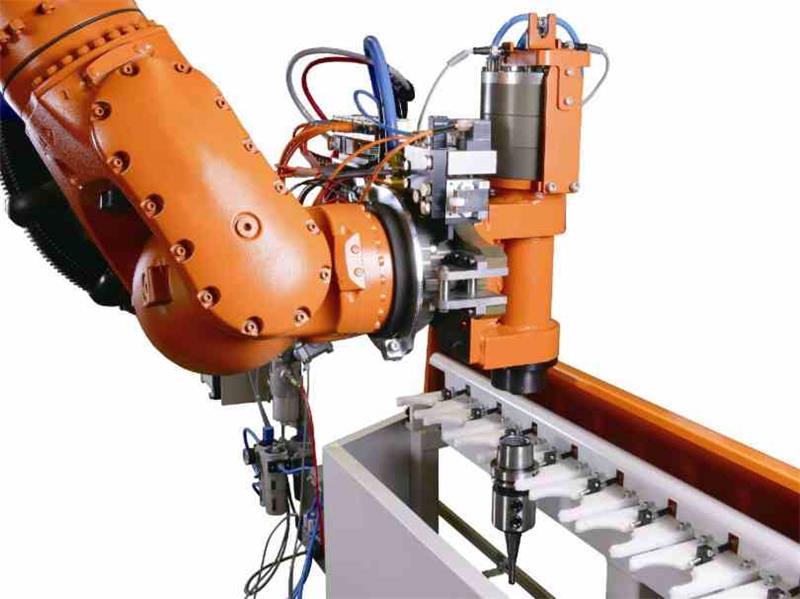
在打磨过程中,控制力和位移是提高打磨性能的关键。很难控制末端执行器和工件之间的接触力。研究人员磨机器人人力控制进行了大量的研究,发现打磨过程中末端执行器与工件之间存在较大的相互作用力,并且该作用力的控制精度将直接影响加工精度和机器人的位置控制。因此,位置和力的同时控制对于打磨操作来说是一个挑战.抛光机器人领域的研究人员采用主动柔顺控制、被动柔顺控制以及主动和被动柔顺控制。主动柔顺控制的常用方法是功率位置混合控制和阻抗控制







Kuka Titan系列机器人,该机器人带有一个40马力的主轴电机作为末端执行器。这个令人生畏的组合创造了一个巨大的机器人打磨工具。该机器人有6个运动轴,延伸距离近12英尺,能够以惊人的灵活性完成大范围的工作。除了机器人的尺寸之外,它还具有1650磅的有效载荷能力,使其能够携带巨大的40马力主轴电机进行打磨,并能够在主轴末端产生足够的力来进行一些严重的材料去除。
任何打磨环境的主要限制之一是材料的去除速度。这是材料硬度和横截面的函数,或者是被去除材料的体积。高速主轴电机用于通过简单地加速来改善材料去除,通常速度为10,000至40,000 rpm。然而,在打磨过程中,去除的材料量会出现不必要的变化。



目前,有两个10英尺直径的工作台用于零件,由第三个工作台支持,该工作台可以将工作引入和引出机器人的工作范围。所有三个工作台都由闭环液压致动器独立控制。工作台多可支撑四个零件,每个零件重达3,750磅。主桌具有相当大的额外容量,可支撑多达15,000磅的工作。工作台系统依靠多个液压缸,因此它是水平和均匀支撑的。
机器人打磨通过增加能够相对自由地在零件内部操作的灵活性而大大超越了5轴加工。清理铸件的内表面相对容易,因为机器人可以从任何一侧进入内部。
SET机器人打磨中心将CAD、CAM、视觉、称重传感器、主轴驱动和机器人结合成一个优雅的、高生产率的工作单元,解决了许多应用问题。新解决方案的经济效益引起了几家大公司的注意,它们表示有兴趣根据自己的要求测试该系统

扫一扫手机网站






 在线客服
在线客服 185-12233227
185-12233227 litao_llt@163.com
litao_llt@163.com