欢迎来到天津华茂致远自动化科技有限公司网站!

 185-12233227
185-12233227



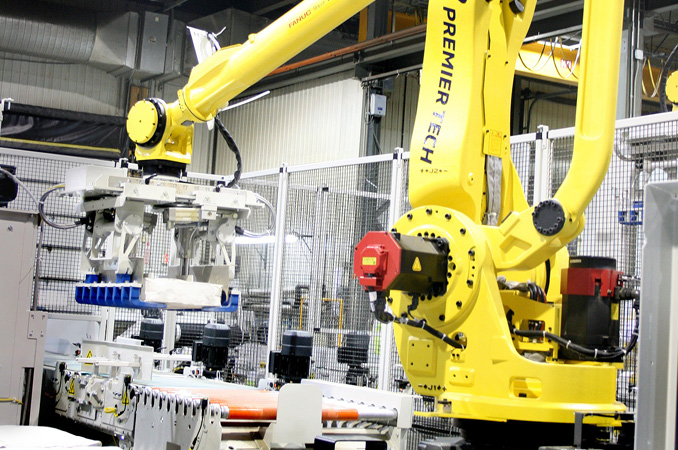




码垛机器人通常是4轴机器,尽管在需要时它们可以有5轴甚至6轴。号码轴的自由度决定了机器人在提升和放置产品时的自由度。4轴机器能够沿其底座旋转,触及产品,提升/降低产品,并旋转其末端执行器来定位产品。
它们的容量从几磅到一吨多不等。一个单一的单位可以编程码垛多条线,或在高速运行,多个单位可以码垛一条线。
它们的操作相对简单。手动或自动托盘分配器将托盘放置在区域。码垛系统可以或不可以被编程为将薄衬纸放置在托盘上。









一旦一个层已经形成,端部挡块被移除,并且该层被传送到层处理机器人。这将提升该层并将其移动到托盘上。
混合案例机器人码垛机能够采取不同大小和形状的盒子和案件,并使他们稳定层。有许多方法可以做到这一点。
安装在轨道上的基座式机器人可以在中转区的一系列托盘之间移动。在每个货盘上,它提升产品并以预定的稳定配置将其放置在接收货盘上。




根据不同物料包装、堆码顺序、层数的要求设置参数,实现不同类型包装物料的堆码操作。按功能分为送袋、转向、理袋、分组、抓袋码垛、托盘仓、托盘输送及相应的控制系统。
码垛机械抓具的特点:
占地面积小,场地,操作简单;
握持形式,应用灵活,工作安全
结构简单,故障率低,易于维护;
实现了直线运动,简化了运动控制程序;

扫一扫手机网站






 在线客服
在线客服 185-12233227
185-12233227 litao_llt@163.com
litao_llt@163.com